СПИСЪК
НА ЛАБОРАТОРИИТЕ
В
КАТЕДРА СИСТЕМИ И УПРАВЛЕНИЕ
ЛАБОРАТОРИЯ 2105 Д
Отговорник доц. д-р Теофана Пулева
В
нея се провеждат упражнения няколко дисциплини, включително по „Моделиране и
симулиране на процеси и системи”. За целите на обучението по тази дисциплина лабораторията
е снабдена с моделиращи
среди PID Board Type 5120, произведени от фирмата Hps Systemtechnik – Германия
и придружаваща
апаратура – осцилоскопи и функционални генератори. Изграждащите блокове (интегриращи,
пропорционални, диференциращи, апериодични звена, инерционни звена от трети
ред, суматори, сравняващи елементи, нелинейни блокове – релета с настройваем
хистерезис и ограничители) са проектирани на щекерен принцип, което дава
възможност на моделиращия стенд да бъдат изграждани произволни по сложност
системи.
Тези
моделиращи среди позволяват:
-
да бъдат изследвани характеристики в честотната и времева област на аналогови
модели на системи;
-
чрез експерименти да се визуализират изучавани в теорията характеристики на
системите, устойчивост и качество на процесите.
-
изградените чрез тях аналогови модели на системи да бъдат използвани в
качеството на обекти на управление при изследване на различни управляващи
алгоритми, реализирани в средата на промишлени програмируеми контролери (PLC) –
лаборатории 2120Д и 2120Е разполагат с контролери на фирмите Siemens и
Schneider Electric. Подобни изследвания се провеждат в курсови и дипломни
работи.
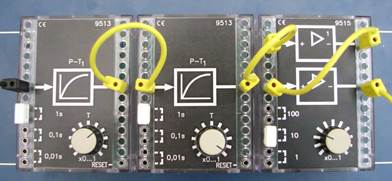

Фигура 1. Моделираща среда PID Board

Фигура 2. Изглед на лабораторията

Фигура 3. Аналогов модел, управляван чрез PLC
ЛАБОРАТОРИЯ ПО СЪВРЕМЕННИ СИСТЕМИ ЗА
УПРАВЛЕНИЕ 2114 Б
Отговорник гл. ас. д-р Аспарух Марковски
Лабораторията
е снабдена с лабораторни физически модели, произведени от полската фирма INTECO
Ltd. Основната идея при реализация на системите за управление е да бъде
създаден бърз и пряк достъп на управляващата система до хардуерната част чрез
RT-DAC/USB, снабден с ЦАП и АЦП преобразуватели. Входно/изходните модули са
свързани със силовия интефейс на системата. Лабораторните модели поддържат
работа в реално време, както и изпълнение на сложни управляващи алгоритми,
реализирани в средата на MATLAB/Simulink®. Проектираните закони за управление
се трансформират в управляващи в реално време алгоритми чрез средствата, които
предлага Real Time Workshop на MATLAB®. Стендовете INTECO осигуряват възможност
за практическо приложение на класическата и съвременната теория на управлението
и решаване на задачи по моделиране, идентификация и управление.

Фигура 4. В лабораторията
Двуроторна
аеродинамична система
Тя
представлява лабораторно оборудване, чието динамично поведение наподобява това
на хеликоптер. От гледна точка на теория на управлението илюстрира многомерна и
нелинейна система от висок ред. Механичната система се състои от греда, която
може да се върти около центъра си едновременно в хоризонтална и вертикална
равнина. В двата края на гредата се намират ротори (главен и опашен), които се
задвижват от постояннотокови двигатели. При хеликоптера аеродинамичната сила се
управлява чрез промяна на ъгъла на атаката. В това лабораторно оборудване
ъгълът на атаката е фиксиран, а аеродинамичната сила се управлява чрез промяна
на скоростта на роторите. Ето защо управляващите въздействия са захранващите
напрежения на двигателите. Промяната на напрежението води до промяна на
ъгловата скорост на роторите, което от своя страна до промяна на положението на
гредата. Наблюдава се силно влияние между каналите на управление – всеки ротор
влияе и върху двата ъгъла на отклонение - в хоризонталната (по азимут) и
вертикалната равнина (по тангаж). Управляващият софтуер е реализиран в средата
на PC и използва RTW toolbox на MATLAB ®. Той дава възможност да въде
извършвана on-line идентификация, моделиране на системата за управление, синтез
и симулиране, както и реализиране на
различни управляващи алгоритми в реално време.


Фигура 5. Двуроторна аеродинамична
система
Система
за изследване на магнитна левитация
Явлението
магнитна левитация намира много практически приложения, някои от които са
свързани със съвременните транспортни средства – високоскоростните влакове на
магнитна възглавница. Лабораторният модел на системата за магнитна левитация
включва физически модел на процеса, който се състои от два електромагнита,
феромагнитна сфера, датчик за положение, както и драйвери, компютърен интерфейс
и среда за управление в реално време RTW на MATLAB®. Целта на системата за
управление е да се управлява положението на феромагнитната сфера във въздушната
междина между двата електромагнита, чрез управление на тока през тези
електромагнити. Системата е неустойчива в отворен контур и представлява типичен
обект, върху който могат да се направят ред изследвания, свързани със задачи на
анализа и синтеза на системи за управление.

Фигура 6 Система за изследване на магнитна левитация
Модулна
мехатронна система
Системите
за сервоуправление са едни от най-важните и широко използвани системи за
автоматично управление. Проектирането на сервоуправление обикновено е свързано
с решаване на следните задачи: стабилизация на скоростта на двигателя при
променлив товар и промяна на скоростта на двигателя от външно задание.
Лабораторният физически модел се състои от сервомеханизъм с цифрово управление
и софтуер, подходящ за работа в реално време. Сервосистемата се състои от
няколко модула монтирани на метална релса и куплирани един към друг. Модулите
са подредени във верига, в началото на която са разположени постояннотоков
двигател и тахогенератор, а в края - скоростна кутия и следящ диск. При
завъртане на двигателя се активират инерционният модул, луфт, енкодер, магнитна
спирачка и скоростна кутия със следящия диск. Ъгълът на завъртане на вала на
двигателя се определя чрез енкодер и допълнително чрез тахогенератор. Този стенд
дава възможност да бъде изследван широк спектър алгорими за управление –
класически и в пространство на състоянията, адаптивни регулатори съчетани с
адаптивно оценяване и компенсация на смущения в съпротивителния момент.

Фигура 7 Модулна мехатронна система
Система
от свързани резервоари
Системата
от свързани резервоари е свързана със задачата за управление на ниво, която се
среща в много индустриални приложения. Лабораторният стенд се състои от три отделни
резервоара, разположени един над друг и захранвани чрез регулируеми вентили.
Един от резервоарите има постоянно сечение, а другите са с променливо сечение
поради тяхната сферична или пирамидална форма. Това конструктивно изпълнение
внася нелинейности в системата. Системата е многомерна с три регулируеми
величини, представляващи нивото в трите резервоара и с до четири входни
въздействия. Целта на управлението е да се стабилизира нивото във всеки
резервоар чрез управление на дебита на помпата и/или регулируемите вентили.
Системата е проектирана да работи с външен цифров контролер, който е реализиран
чрез PC. Той осъществява комуникация със сензорите за ниво, регулируемите
вентили и помпата чрез входно-изходния и силовия интерфейс. Входно-изходният интерфейс
се управлява от сотуер за работа в реално време, който работи в средата на
MATLAB/ Simulink RTW/RTCON. Този лабораторен стенд дава възможност да се изучат
и практически да се изследват чрез експерименти в реално време на линейни и
нелинейни закони за управление в условия на технологични ограничения за дебита
на помпата и вентилите, при наличие на шум в измерванията и възможност за
симулиране на смущения.

Фигура 8 Система от свързани резервоари
Обърнато
махало
Този
лабораторен стенд може да се счита за физически модел на голям брой реални
обекти за управление. Такива обекти има в роботиката, където често се управлява
положението на единична греда, като се упражнява сила в единия й край.
Системата за балансиране представлява демонстрационен модел, илюстриращ
проблема за стабилизиране на полет на ракета. Пристанищният кран е друг пример
за нелинейна електромеханична система със сложно динамично поведение.
Изброените примери за обекти могат да се моделират физически чрез стенда с
просто единично махало в устойчиво и неустойчиво равновесно състояние.
Лабораторният стенд (системата махало-количка) се състои от греда, закрепена на
количка, така че гредата да може да се люлее само във вертикалната равнина.
Количката се задвижва от постояннотоков двигател. Задачата за управление на
махалото е да се доведе гредата до едно от равновесните състояния. За
предпочитане е това да стане възможно най-бързо, с малко колебания, без да се
допуска ъгловата и линейната скорости да са прекалено големи и без да се
достигат ограниченията за управлението.
След достигане на желаното положение е необходимо да се задържи системата в
това състояние, въпреки наличието на смущения.

Фигура 9 Обърнато махало
ЛАБОРАТОРИЯ ПО СЪВРЕМЕННИ СИСТЕМИ ЗА
УПРАВЛЕНИЕ 2120В
Отговорник гл. ас. д-р Йордан Кралев
В лабораторията има
5 развойни комплекта Spectrum Digital eZdspTMF28335, вградени цифрови контролери Texas Instruments TMS320F28335, различни видове инерциални
затчици,сигнални генератори и др. Разработени са два двуколесни робота с алгоритмите
и реализацията за вградено управление, квадрокоптер, класически хеликоптер и
др.



Фигура 10 Обекти в лабораторията
ЛАБОРАТОРИЯ ПО ИНДУСТРИАЛНИ СИСТЕМИ ЗА
УПРАВЛЕНИЕ НА ФИРМАТА SCHNEIDER ELECTRIC 2120 Д
Отговорници:
доц. д-р Т.
Пулева и доц. д-р . Ружеков
Лабораторията
е оборудвана с четири работни стенда. Всеки включва захранване от серията ABL,
програмируем логически контролер от серията M238LFDC24DT, който се програмира
със среда за развитие CodeSysV3, разширителен блок с аналогови входове и изходи
TM2AMM6HT, сензорен екран Magelis HMISTU855, блок от бутони със сигнални лампи
и честотни преобразователи Alvitar32 и Alvitar12, среда за разработване
SoMachine, разработена от Schneider Electric за създаване и
конфигуриране на проекти.

Фигура 11 Лабораторен стенд на Schneider Electric
В
качеството на обекти за управление могат да бъдат използвани моделиращи среди
PID Board Type 5120, произведени от немската фирмата Hps Systemtechnik (фиг.
2). Изграждащите блокове (интегриращи, пропорционални, диференциращи,
апериодични звена, инерционни звена от трети ред, суматори, сравняващи
елементи, нелинейни блокове – релета с настройваем хистерезис и ограничители)
са проектирани на щекерен принцип, което дава възможност на моделиращия стенд
да бъдат изграждани произволни по сложност системи, както и да бъдат симулирани
нестационарни свойства на изследваните системи.

Фигура 12. Моделираща среда PID Board
Type 5120
Друг
лабораторен физически обект, удобен да бъде управляван чрез PLC е физическият
модел на промишлен резервоар на немската фирма LUCASS-NULLE (фиг. 3), като чрез
него могат да се възпроизвеждат условия близки до реалните.

Фигура 13 Физически модел на промишлен
резервоар
Обектът
се състои от резервоар с вода със скала за измерване на нивото в [%], вентил за
източване на водата, помпа, тръбни връзки, сензор за измерване на нивото в
резервоара с настройваеми нула и коефициент на усилване, напреженов изход на
преобразувателя налягане-напрежение на сензора за измерване на нивото, сензор
за измерване на входния дебит на водата, преобразувател дебит – напрежение на
сензора за входния дебит, ключ за допълнителна обратна връзка по дебит, ръчен
входен и изходен вентил, извод за подаване на управляващо напрежение към
помпата. Сензорът за ниво е реализиран на базата на хидростатичен принцип. Той
подава входен сигнал налягане към преобразувателя налягане-напрежение.
Преобразуваният сигнал е в диапазона 0-10 V. Управляващият сигнал за помпата е
в същия диапазон. Благодарение на стандартните нива на сигналите системата за
управление може да се реализира с конвенционални технически средства като PLC
или PC, при което за връзка с обекта се използва подходяща аналогова периферия.
Лабораторията
е предназначена за научно-изследователска работа (курсови проекти, дипломни
работи за бакалаври и магистри, както и за научни изследвания по договорна
тематика).
ЛАБОРАТОРИЯ ПО ПРОМИШЛЕНИ СИСТЕМИ ЗА
УПРАВЛЕНИЕ НА ФИРМАТА SIEMENS 2120E
Отговорник: доц. д-р Георги Ружеков
Лабораторията
по „Промишлени системи за управление” е оборудвана е с шест работни места с
компютри, аналогови и физически обекти за управление, промишлени контролери -
PLC Siemens и Vipa с пълна комплектовка от софтуер. Тя може да покаже
съвременни промишлени контролери, сервосистеми и инвертори, както и лабораторни
обекти, които се управляват с тях. Основно лабораторията разполага с техника на
фирмите Siemens и Schneider, с която се онагледява обучението по дисциплините,
свързани с реализацията на регулатори и реални промишлени системи.



Фигура 14 Лаборатория по промишлени системи за управление

Фигура 15 Хибридна среда за моделиране
и управление

Фигура 16 Система за регулиране на ниво
и дебит

